Time limit
5 minutes
Control method
Autonomous
Aim of the challenge
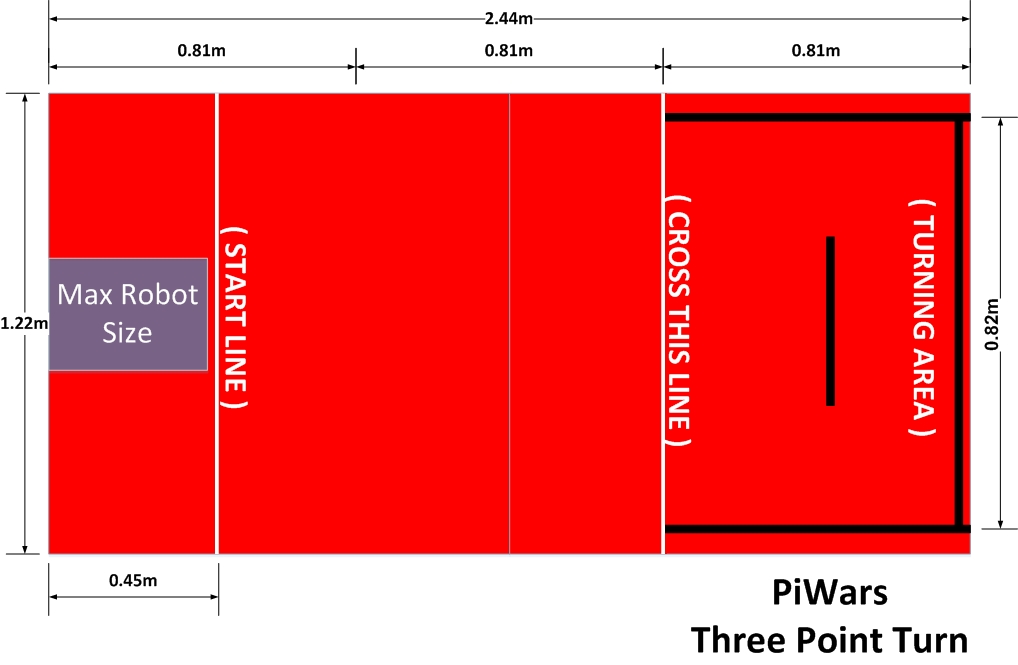
The robot must be autonomously programmed for this challenge which takes place inside a course measuring 1.22m by 2.44m with various markers. A picture of the course is shown on the right (click for a larger version).
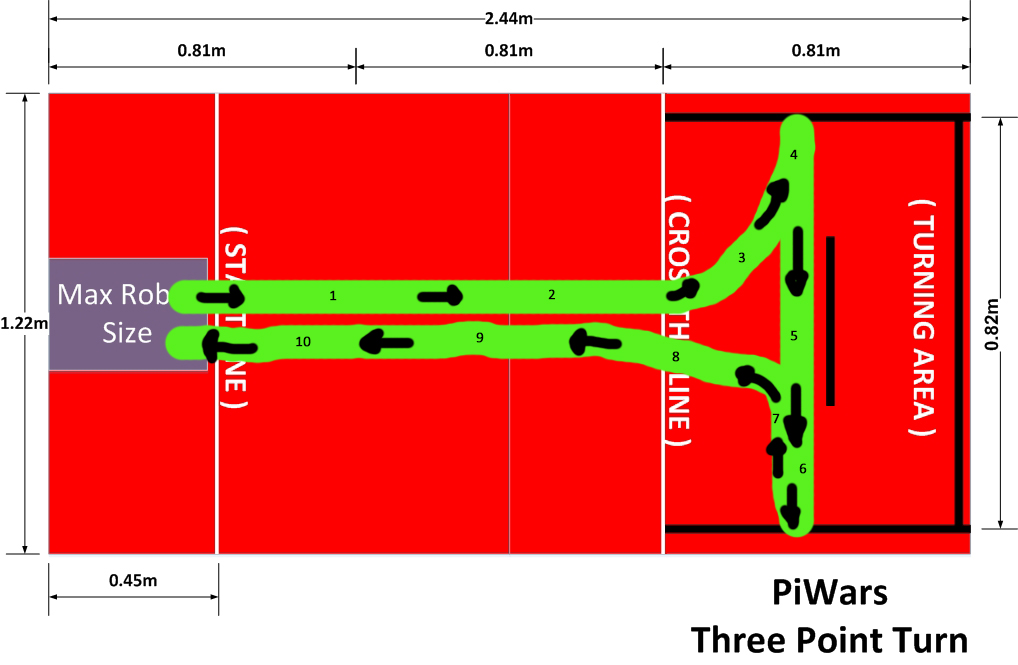
The robot will:
- start in the middle of the course surface, behind the white “start line”.
- proceed forward and cross the second white line (“CROSS THIS LINE”).
- turn left by 90 degrees (either on the spot or in-motion).
- drive forward and touch or cross the ‘top’ black edge line.
- drive backwards in a straight line and touch or cross the ‘bottom’ black edge line.
- drive forwards to the middle of the turning area.
- turn left by 90 degrees.
- return to the starting box.
The measurements of the course as shown in the diagram are correct and will be measured as such when the course is marked out. The distances of travel required within the turning area will, of course, vary according to the length of your robot – it is up to you to prevent it from leaving the course surface.
Ranking and points
Robots will be ranked according to how quickly they return to the starting box after having completed all turns and movements correctly. The fastest will be ranked first. Points will be awarded to the top ranked robots like so:
- 1st: 40 points
- 2nd: 32 points
- 3rd : 25 points
- 4th : 18 points
- 5th : 15 points
- 6th : 12 points
- 7th : 10 points
- 8th : 8 points
- 9th : 6 points
- 10th : 4 points
- 11th : 2 points
- 12th : 1 point
Additional points:
- 10 points will be awarded to any robot that finishes the three-point-turn successfully and completely crosses the white start line on its return.
- 20 points will be awarded for any robot that finishes the three point turn successfully and finishes with any wheel inside the starting box.
Penalties:
- Any rescue of the robot will incur a 20 second penalty.
- Only 2 rescues are allowed before the challenge is abandoned.
- If the robot’s wheels go beyond the perimeter of the course, this will incur a 15 second penalty in addition to the ‘rescue’ penalty.