Aim of the Challenge
- To drive the course, without touching the walls, as quickly as possible.
Control Method
- Autonomous
Time Limit
- 7 minutes
Rules
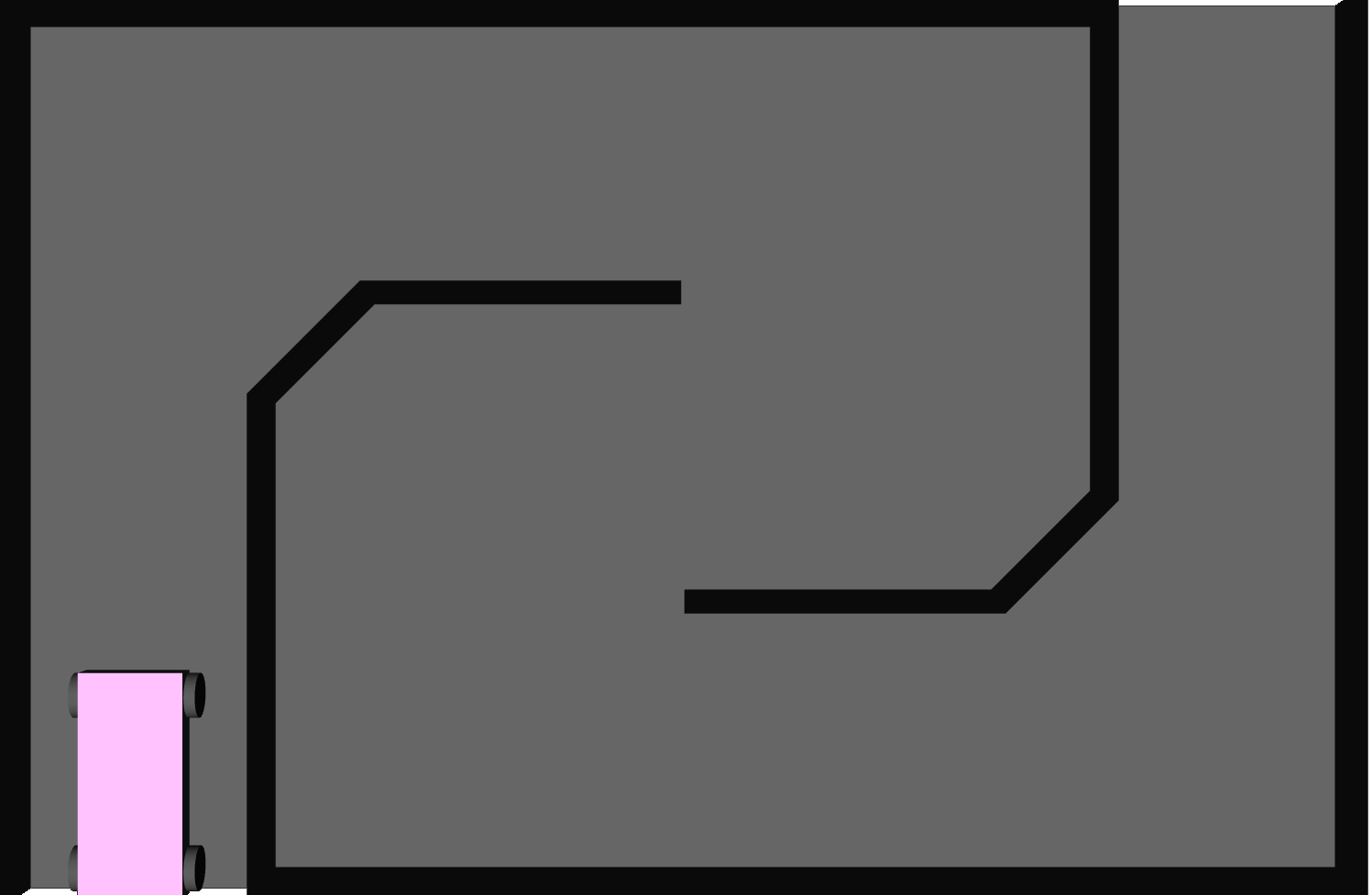
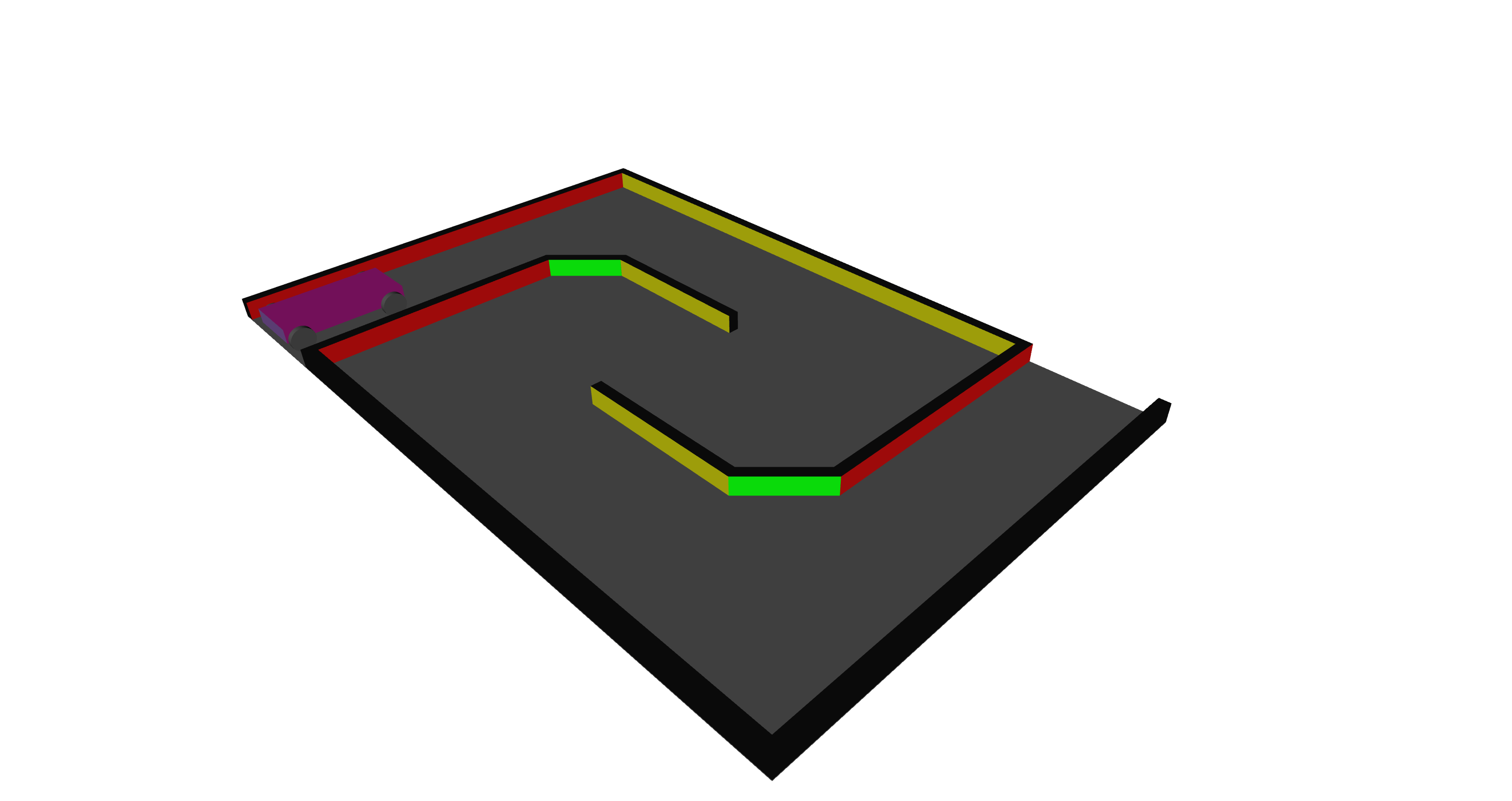
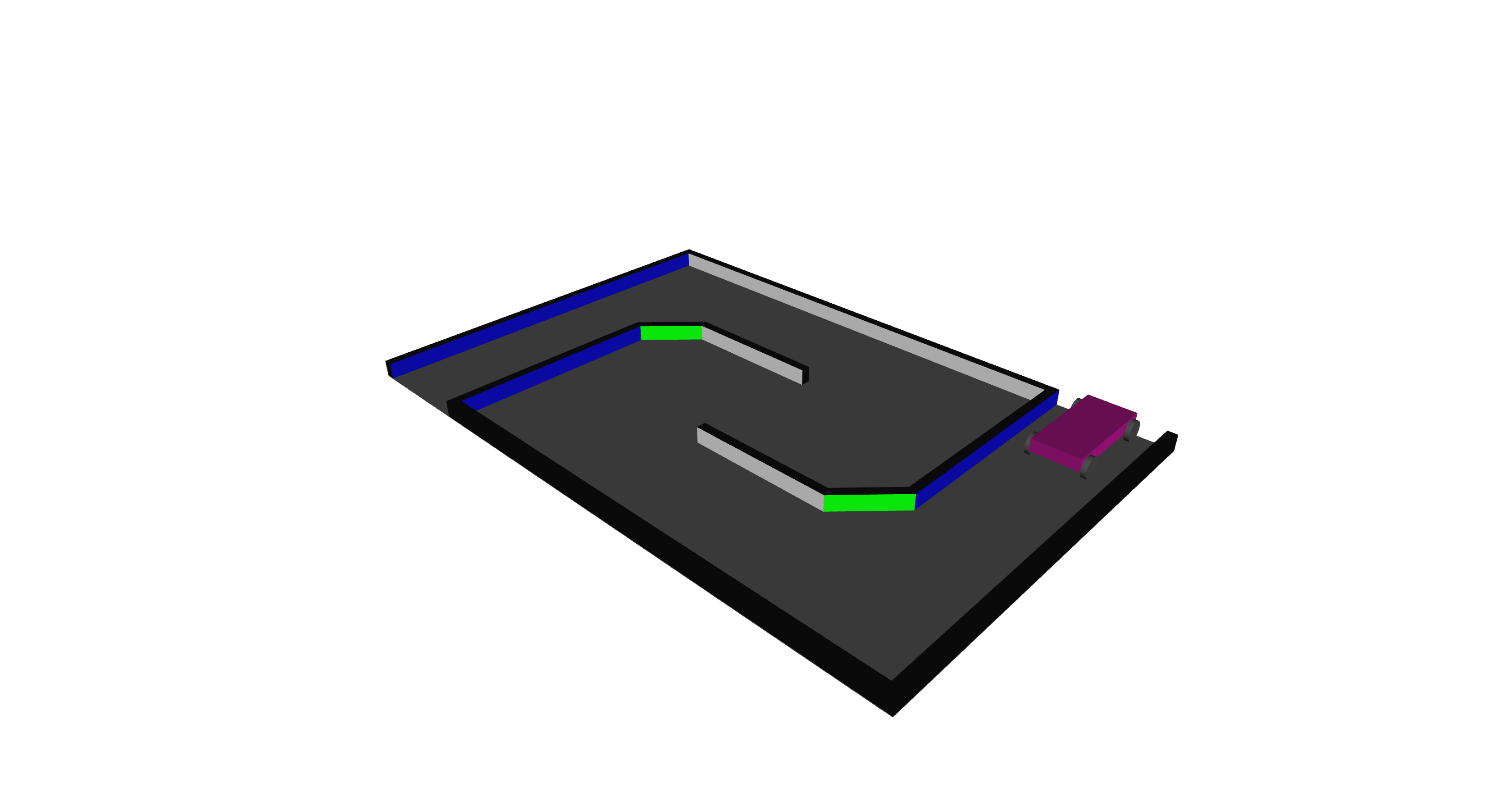
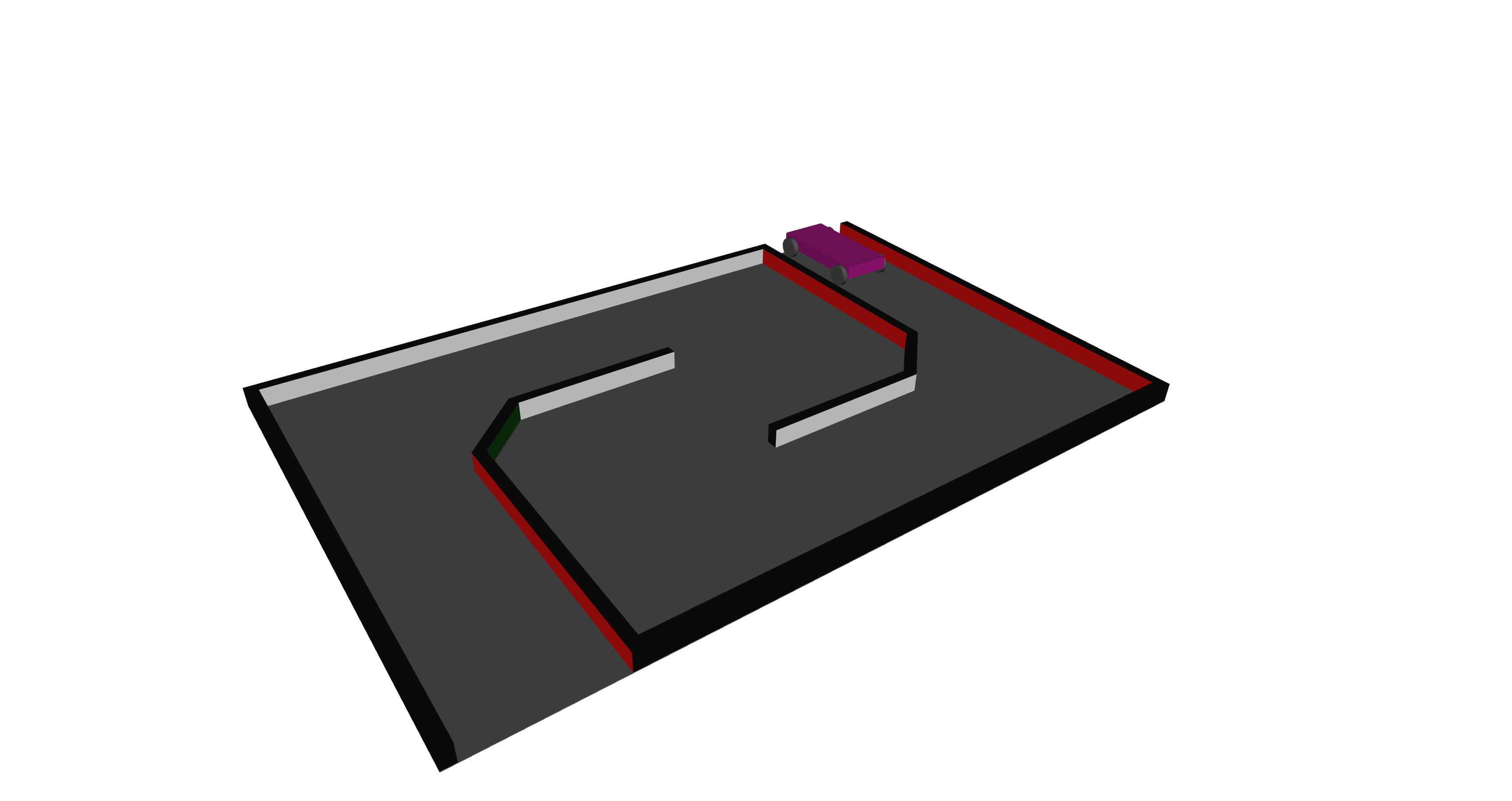
- The minimal maze is a simple course made of wood with walls 64mm high that are painted different colours as shown in the diagrams below (click images to enlarge).
- This course plan shows the course dimensions; the robot is to scale.
- Sensors, a camera or wheel encoders will be required for this challenge!
- The course will be driven three times and the times added together to make a final time.
- It is permitted to add up to 6 small, temporary ‘targets’ to the walls and floor of the course. For example, you could add coloured ‘blobs’ to the floor at certain way-points. They must be removed at the end of your runs without, for example, taking up the paint of the course floor! The sticking down of markers or lines with adhesive is not permitted.
Ranking and Points
- Competitors will be ranked according to the total time taken to drive the course three times. The robot with the shortest time will take first place.
- Points will be awarded to the top ranked robots like so:
- 1st: 40 points
- 2nd: 32 points
- 3rd : 25 points
- 4th : 18 points
- 5th : 15 points
- 6th : 12 points
- 7th : 10 points
- 8th : 8 points
- 9th : 6 points
- 10th : 4 points
- 11th : 2 points
- 12th : 1 point
Additional points
- 20 points will be awarded for each completed run.
- 30 additional points will be awarded for each ‘clean’ run. (i.e. no walls touched).
- 10 additional points will be awarded to robots that use sensors/cameras only to navigate the course. i.e. This bonus will only apply to robots that are not pre-programmed with distances and angles using wheel encoders, for example.
- 20 additional points will be awarded to the robot that has the fastest individual run.
Penalties
- It is permitted to rescue the robot and place it back on the course at the place where things went wrong once per run without penalty but the clock will not be stopped.
- A second rescue is permitted, incurring a 30 second penalty.
- A third rescue is not permitted, instead the run must be abandoned.
- Each time the robot touches a wall, a 10 second penalty will be incurred to a maximum of 40 seconds.
- Abandoned or non-completed runs will be penalised by 3 minutes.
- Runs not completed within the time limit will be penalised by 3 minutes.
Hints
- The walls are 64mm high; ensure any sensors used are able to detect them at that height.
- If your robot uses the colour of the walls to detect position, remember that the lighting conditions on the day may be different to your own location.
- Course dimensions have been given accurately; you may find it useful to replicate the course.
- The floor is painted matt black.
Ask Questions and Discuss
You can discuss this challenge and ask questions on this discussion forum.