Time limit
5 minutes
Control method
Autonomous
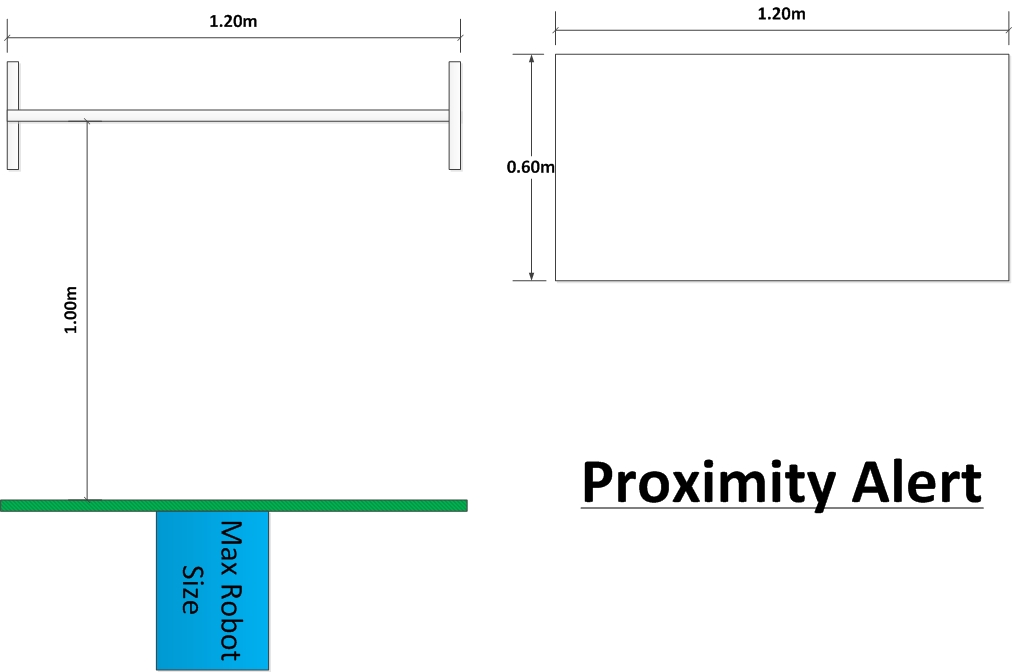
Aim of the challenge
Your robot will proceed autonomously from a start line and will use sensor(s) to prevent hitting a wooden wall 1 metre away. It will do this a total of 3 times. After each approach and stop, you will retrieve your robot and carry it to the start line. No part of the robot is permitted to touch the wall, so tactile sensors ‘feeling’ the wall would constitute a failure.
Ranking and points
The distances to the wall will be measured and totalled. The distance measured will be the closest point between any part of the robot and the wall. Robots will be ranked according to the total distance. First place will be awarded to the robot with the lowest total distance.
Points will be awarded to the lowest distances like so:
- 1st: 40 points
- 2nd: 32 points
- 3rd : 25 points
- 4th : 18 points
- 5th : 15 points
- 6th : 12 points
- 7th : 10 points
- 8th : 8 points
- 9th : 6 points
- 10th : 4 points
- 11th : 2 points
- 12th : 1 point
Additional points
- 5 points will be awarded for each successful approach and stop.
Penalties
- A penalty of 30cm will be added to the total if the robot touches the wall.
- A penalty of 30cm will be added to the total each time the robot is deemed to have failed to approach the wall.
- If you run out of time, or you need to abandon the challenge for any reason, this will result in a penalty of 50cm per run remaining.
